

现如今,工业生产和人们的日常生活对电力的需求不断增长。国家能源局公布的2022年度电力工业统计数据显示,到2022年12月末,我国发电装机容量累计达到25.6亿千瓦左右,同比增长7.8%[1]。输电塔作为电力传输系统中的重要组成部分,主要用于支撑高压输电线路,其塔基的承载能力和稳定性直接影响着输电线路能否安全运行。
近年来,由于山体滑坡等因素引起的电塔倒塌事故常有发生,往往会导致电力中断、财产损失甚至人员伤亡,同时伴随着旧塔基的拆除和新塔基的搭建,为保证塔基的稳固需要及时对输电塔塔基进行检测。传统的输电塔塔基检测工作常采用人工巡检的方式,但针对所处地区偏僻、自然条件复杂的输电塔而言,人工检测难度非常大。不仅需要投入大量的人力物力等资源,而且还存在着测量数据不准确、遗漏等问题。近年来,在无人机、遥感影像和深度学习等先进技术的推动下,输电塔塔基自动检测应运而生。
1 相关工作
在当前的研究中,以卷积神经网络为基础的目标检测方法被广泛应用,主要分为两类:双阶段目标检测和单阶段目标检测。双阶段目标检测是从输入图像中随机选出几千个候选区域,然后以这些候选框为基础进行二次修改,从而获得最终检测结果,虽然它的检测准确率比较高,但检测速度比较慢。双阶段目标检测的代表算法有R-CNN[5]、Faster R-CNN[6]等。Wang等[7]使用Faster R-CNN对输电塔进行识别研究,并在小样本的情况下,对输电塔的检测取得了较好的识别效果。曹志勇等[8]对Faster-RCNN进行了改进,将主干提取网络替换为ResNet-50,同时在检测过程中加入了多尺度特征融合技术。单阶段目标检测的代表就是YOLO系列算法,有YOLOv1[9]、YOLOv2[10]、YOLOv3[11]等。为了解决密集目标检测的复杂场景中YOLOv3算法漏检现象,宋成根等[12]将损失函数DIoU和非极大值抑制算法相结合,以提高杆塔目标检测的精度。Mo等[13]将YOLOv4用于电塔的检测,对输电铁塔损坏的检测起到积极的作用。孙乐杨等[14]将GDAL模块应用于YOLOv5网络中,以识别输电塔的地理坐标。目前,YOLO系列主流的目标检测算法YOLOv7[15],在5~160帧/s的范围内检测精度和速度超过了绝大多数目标检测器。因此,本文尝试将YOLOv7应用到自建的输电塔数据集上,并对模型做出改进以提高输电塔检测算法的准确性和速度,为后续塔基区周围水土情况的研究奠定基础。本文的主要工作包括:1) 对无人机采集到的复杂地形下的图像进行筛选和预处理操作,保证数据集的高质量和多样性;2) 在原网络结构的Backbone层中添加CBAM[16]注意力机制,用于提高对输电塔塔基特征的提取能力;3)引入WIoU v3[17]代替原坐标损失函数CIoU[18],以提高目标检测任务的准确性和稳定性。通过实验对比,发现改进后的算法检测精度得到了提高,为输电塔塔基高效检测提供了一种有效方案。
2 数据集
2.1 数据来源

2.2 数据预处理
为便于模型训练,本文将图像大小下采样至1 915像素×1 276像素(模型能自动将图片裁剪成640像素×640像素大小)。然后,利用OpenCV对图像进行随机旋转、镜像、垂直或水平翻转、亮度平衡等数据增强操作,将得到的3 495幅图片用作本文的实验数据。最后,对操作后的图像大致按8∶1∶1的比例进行随机划分:训练集2 830幅,验证集315幅,测试集350幅。
2.3 数据标注

3 YOLOv7算法
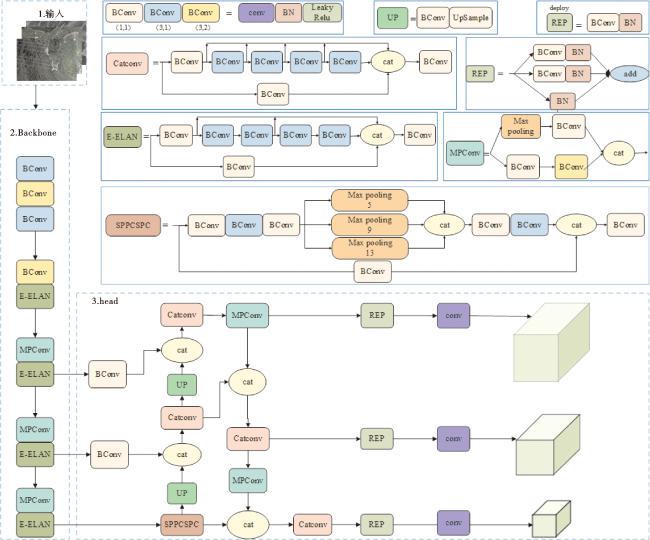
YOLOv7网络结构主要分为输入端、Backbone和head三大部分,如图3所示。输入端是对输入图片进行图像预处理相关操作;Backbone层主要进行特征信息的提取,其中E-ELAN模块提高了网络的学习能力,并指导不同的计算模块来学习更多的多样化特征;head层由SPPCSPC层、若干MPConv层、若干Catconv层以及Rep层组成,SPPCSPC层通过在不同尺度上进行池化操作来捕捉多个感受野的特征信息,以便更好地适应不同大小的目标,并通过跨阶段部分连接的方式使得特征能够更快地从主干流传播到支路流,从而提高特征的表达能力,最后经过Rep层输出检测结果。总体而言,YOLOv7从模型结构重参数化和动态标签分配两方面对网络进行了优化。在规划重参数化模型上,通过分析梯度流传播路径和对网络中不同模块的重参数化策略,并且结合重参数化卷积对不同模块进行处理,YOLOv7既保留了网络预测性能,又减少了网络复杂度。YOLOv7的动态标签分配策略将YOLOv5和YOLOX中的正负样本分配策略进行结合,筛选出更多正样本,以提升召回率。最后,采用多种Detect检测头,对特征信息解耦,进而确认目标的位置和类别,提高了网络模型的特征提取能力,使得目标检测的精确度得到了提高。
4 YOLOv7检测算法的改进
4.1 CBAM
本研究是对复杂地形下的输电塔塔基进行检测,常常会出现塔基底不完整的情况,根据现实检测需求,提出添加卷积块注意力模块(convolutional block attention module,CBAM)混合注意力机制的改进算法。CBAM由通道注意力模块(CAM)和空间注意力模块(SAM)构成,如图4所示。通道注意力聚焦于“什么”是有意义的,计算过程如式(1)所示。
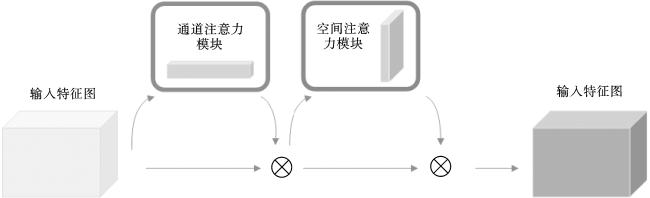
式中:F为输入特征图,MLP为多层感知器;σ表示sigmoid函数; 和 分别为平均池化特征和最大池化特征;W0∈ ,W1∈ ;r1为缩减比。使用全局平均池化和最大池化操作后,再与多层感知器进行融合,然后通过激活函数sigmoid生成通道映射MC∈RC×1×1,其中C表示通道数。
空间注意力聚焦于“在哪里”需要关注,对通道注意力模块进行辅助,计算过程如式(2)所示。
MS(F)=σ(f7×7([AvgPool(F);MaxPoo(F)]))=σ(f7×7(; ]))。
式中:f7×7为滤波大小为7×7的卷积操作; ∈R1×H×W, ∈R1×H×W,H和W表示特征图的高和宽。输入特征图沿着通道方向进行平均池化和最大池化操作后,再经过融合和卷积,通过激活函数sigmoid生成空间注意力特征信息,最后与输入特征图相乘得到输出特征图。
4.2 损失函数的改进
损失函数用来衡量预测标签和真实标签之间的差异程度。一个好的损失函数应该在目标框和真实框重合时弱化几何因素的惩罚,从而使模型获得更好的泛化能力。合适的损失函数可以使得模型加快收敛,以此提高目标检测的精准度和稳定性。
YOLOv7原坐标损失函数CIoU,不仅考虑目标框与真实框的重叠度和中心点间的距离,还进行长宽比的衡量,能够较为准确地判断预测框和真实框之间的相似程度。
但电网工程所处自然条件背景复杂,无人机采集到的塔基训练集中不可避免地包含低质量的数据。距离、纵横比等几何因素会加重低质量数据的惩罚,从而降低模型的泛化性能。引用动态非单调的聚焦机制,即Wise-IoU来代替YOLOv7原有损失中的CIoU。
Wise-IoU共有3个版本:WIoU v1构造了基于注意力的边界框损失,WIoU v2和WIoU v3则是在此基础上进行改进。WIoU v1定义见公式(3)~(5)所示。
LWIoUv1=RWIoULIoU,
RWIoU=exp ,
LIoU=1- 。
式中:x和y是预测框的中心点坐标;xgt和ygt是真实框的中心点坐标;Wg和Hg是包含预测框和真实框的最小矩形的宽高;RWIoU是惩罚项,RWIou∈[1,e),用以对参数进行限制以降低模型复杂度,其将显著放大普通质量锚框的LIoU;LIoU是预测框的IoU损失,LIoU∈[0,1],其将显著降低高质量锚框的RWIoU,并在锚框与目标框重合较好的情况下显著降低其对中心点距离的关注。
WIoU v3定义了一个离群度β,用来替代IoU来描述锚框的质量,其定义为
β= ∈[0,+∞)。
离群度β用于衡量某一对象相较大部分对象的偏离程度,即代表某一预测框的IoU损失 相较大部分预测框IoU损失LIoU的偏离程度,β的大小直接反映预测框的质量高低。我们为离群度较大的预测框赋予较小的梯度增益,以降低质量差示例中有害梯度的占比,并为离群度较小的预测框赋予较大的梯度增益,以使边界框聚焦到普通质量的预测框上。基于上述思想,构造一个非单调聚焦系数r,并将其应用于WIoU v1,得到WIoU v3损失函数
LWIoUv3=rLWIoUv1, r= ,
式中α和δ是事先给定的参数。
WIoU v3通过构造梯度增益的计算方法附加聚焦机制,来减少低质量锚框的干扰,即本文使用WIoU v3损失函数来替换原CIoU Loss,进一步提高了回归精度。
4.3 改进后的YOLOv7检测算法
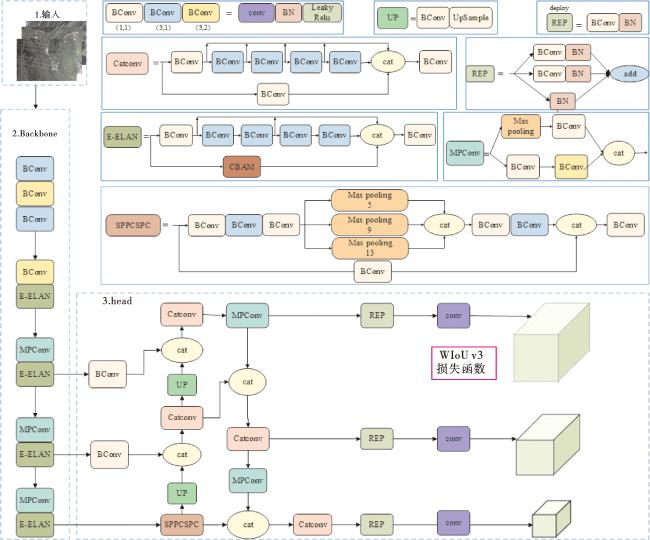
由于存在背景与目标塔基对比度低、塔顶干扰、小目标以及塔基不完整等现实情况,会导致原YOLOv7模型对目标塔基的漏检和误检。为进一步提高塔基检测的精确度,本文在YOLOv7的基础上进行改进:首先将CBAM注意力模块集成到Backbone层的E-ELAN模块中,将E-ELAN中的一个BConv卷积替换为CBAM模块,在控制输入特征图进入最短和最长的梯度路径时,通过CBAM注意力模块提高对塔基的特征提取能力,使网络能够学习到更多的塔基特征,有助于增强模型对输电塔塔基的识别和定位能力,从而提高目标检测任务的准确性,并且具有更强的鲁棒性。然后,使用新的损失函数WIoU v3替换原YOLOv7目标检测头部(head)损失计算过程中使用的坐标损失函数CIoU来优化网络模型。在检测头部,通过损失函数WIoU v3度量预测框的位置和尺寸与真实框之间的差异来调整模型参数,来最小化损失,逐渐优化模型,提高在目标检测任务上的表现。改进后的YOLOv7网络结构图如图5所示。
5 实验与结果分析
5.1 实验环境设置
鉴于YOLOv7在基准数据集上具有较好的检测结果,具备一定的通用性和泛化能力。因此使用预训练好的模型作为基础模型,在本文数据集上微调参数并进行进一步的训练。同时在训练初期冻结主干特征提取网络,防止权值被破坏的同时可以缩短训练时间,并且有助于防止过拟合现象。训练后期进行解冻训练,通过解冻主干特征提取网络并进行端到端的训练,来进一步改善特征表示和分类性能。训练环境及相关参数具体设置如表2所示。
表2 训练环境及参数设置Tab.2 Training environment and parameter settings |
| 训练环境及参数 | 相关配置 |
|---|---|
| 深度学习框架 | Pytorch 1.8.0 |
| Python版本 | 3.8.0 |
| GPU | TITAN Xp |
| 优化器类型 | Adam |
| Epoch(Freeze +Unfreeze) | 100 |
| 批大小 | 4 |
| 初始学习率 | 0.01 |
| Momentum | 0.937 |
| Optimizer weight decay | 0.000 5 |
5.2 评价指标
本文使用精确度(precision,P)、召回率(recall,R)和平均精确度均值(mean average precision,mAP,记作PmA)对模型性能进行评价。定义如式(8)~(11)所示。
P= ,
R= 。
精确度和召回率是分类问题中常用的评估指标,它们可以用来评价分类器的性能。精确度P针对预测结果,指在预测值中某类别正确预测的概率;召回率R针对真实结果,指在真实值中某类别被正确预测的概率。TP为真正例,FP为假正例,FN为假反例。
以精确度和召回率为横纵坐标来绘制出每个类别的Precision-Recall(P-R)曲线。通过对P-R曲线进行积分可以得到某一类别的平均精确度(averageprecision,AP,记作 )。对所有N个类别的AP值求平均得到mAP,它反映了模型在N个类别上的综合性能。
5.3 实验结果及分析
5.3.1 CBAM有效性验证
表3 注意力机制实验对比结果Tab.3 Comparative results of attention mechanism experiments |
| 模型 | mAP/% |
|---|---|
| YOLOv7 | 97.74 |
| YOLOv7+SE | 97.90 |
| YOLOv7+ECA | 98.23 |
| YOLOv7+GAM | 95.36 |
| YOLOv7+SimAM | 94.83 |
| YOLOv7+CBAM | 98.97 |
如表3所示,在本文的数据集上,通过控制变量法在原YOLOv7的Backbone层中添加不同的注意力机制,发现平均精确度均值mAP有不同的表现,说明不同的注意力机制在本文的数据集上对模型性能有不同程度的影响。发现添加混合注意力机制后,mAP的值最好,证明CBAM注意力机制可以帮助网络更好地聚焦于输电塔塔基关键信息,以提高目标检测的准确性。
5.3.2 WIoU v3有效性验证
表4 损失函数实验对比结果Tab.4 Comparison results of loss function experiments |
| 模型 | mAP/% |
|---|---|
| YOLOv7 (CIoU) | 97.74 |
| YOLOv7 (EIoU) | 93.37 |
| YOLOv7 (SIoU) | 94.56 |
| YOLOv7 (AlphaIoU) | 97.98 |
| YOLOv7 (WIoU v3) | 98.47 |
如表4所示,在本文的数据集上,通过控制变量法,由不同的损失函数来替换原YOLOv7目标检测头部损失计算过程中使用的坐标损失函数CIoU,通过对比实验结果中的mAP值发现,将坐标损失函数改进为WIoU v3的模型取得最高的mAP值,即损失函数WIoU v3的引入提高了目标检测模型在边界框匹配和定位方面的性能和鲁棒性,提升了目标检测模型的性能和精度。
5.3.3 消融实验
本文在Backbone层中添加CBAM注意力机制,然后在检测头部分引入WIoU v3代替原坐标损失函数CIoU,来对原YOLOv7模型进行改进。为验证这两部分改进对于塔基目标检测的贡献,通过消融实验进行对比,实验对比结果见表5所示。
表5 消融实验Tab.5 Ablation experiment |
| 模型 | CBAM | WIoU v3 | 参数量/M | 计算量/G | FPS | mAP/% |
|---|---|---|---|---|---|---|
| YOLOv7 | × | × | 34.791 | 103.2 | 39.759 | 97.74 |
| YOLOv7+CBAM | √ | × | 37.245 | 105.2 | 37.417 | 98.97 |
| YOLOv7 (WIoU v3) | × | √ | 35.473 | 105.1 | 38.910 | 98.47 |
| YOLOv7+CBAM (WIoU v3) | √ | √ | 37.387 | 106.4 | 37.125 | 99.93 |
如表5中的消融实验结果所示,在Backbone层中添加CBAM注意力机制,mAP提高了1.23%,可见CBAM注意力机制模块可以帮助模型更好地捕捉不同尺度的空间信息,能够帮助模型更好地理解图像中的输电塔塔基特征,来强化特征表达,以提高塔基目标检测的准确性。在检测头部引入WIoU v3代替原坐标损失函数CIoU,mAP提高了0.73%,该策略在降低高质量锚框竞争力的同时,也减小了低质量示例产生的有害梯度。这使得WIoU v3可以聚焦于普通质量的锚框,提高了塔基检测的精度。本文算法同时引用CBAM注意力机制和WIoU v3损失函数,相较原网络模型,每秒处理的图像帧数FPS降低了2.634帧,虽然参数量和计算量分别增加2.596 M和3.2 G,但改进后的YOLOv7模型的平均精确度均值mAP提高了2.19%,说明本文算法提高了小目标和不完整塔基的识别精度,降低了漏检和误检的情况,保证了网络模型的整体性能。
5.3.4 对比实验
为验证改进后的YOLOv7检测算法的有效性,选择与目前主流的目标检测算法:YOLOv5[27]、YOLOv8[28]、Faster R-CNN进行实验对比。在保证表2中相关参数相同的情况下,在自建的塔基数据集上进行对比实验,其结果见表6所示。本文从参数量(Parameters)、计算量(FLOPs)、每秒处理的图像帧数(FPS)、和平均精确度均值(mAP)四个评价指标来进行不同模型的性能对比。对比表6中的实验结果,本文算法的mAP达到了99.93%,分别比YOLOv5、原YOLOv7、YOLOv8和Faster R-CNN高出4.04%、2.19%、1.14%和3.03%。对比FPS的值发现,目标检测的速度高于Faster R-CNN,相较于原YOLOv7、YOLOv5和YOLOv8较低,但也满足了塔基目标检测的实际需求。本文算法的参数量和计算量没有达到最好,后续可以进行模型剪枝来降低使用到的参数量和计算量。综合4个评价指标的表现,证实了本文算法的两个改进点都是有效可行的;在数据集上的检测效果,也说明本文算法在塔基目标检测的应用上具有一定的优势,具有良好的现实意义。
表6 算法对比试验Tab.6 Algorithm comparison experiment |
| 模型 | 参数量/M | 计算量/G | FPS | mAP/% |
|---|---|---|---|---|
| YOLOv5 | 49.437 | 147.14 | 54.337 | 95.89 |
| YOLOv7 | 34.791 | 103.2 | 39.759 | 97.74 |
| YOLOv8 | 3.005 | 8.1 | 39.960 | 98.79 |
| Faster R-CNN | 119.743 | 374.153 | 19.392 | 96.90 |
| 本文算法 | 37.387 | 106.4 | 37.125 | 99.93 |
5.3.5 检测结果对比
为了对比原YOLOv7模型和改进后的YOLOv7检测模型的性能,选择两模型的损失曲线和P-R曲线进行性能分析。如图6所示,其中图a、b分别为两模型的损失曲线收敛图,横轴为训练过程数(Epoch),纵轴为损失值,曲线显示了模型在训练过程中的损失值随迭代次数的变化情况。随着训练的进行,模型通过梯度下降进行参数调整,逐渐减小与真实标签之间的差异,使得损失值下降。在训练20个Epoch后,两种算法均达到收敛,且本文改进后的YOLOv7模型收敛速度比原YOLOv7快。图c、d分别为两模型在IoU阈值设置为0.5时的P-R曲线图,横轴为召回率Recall,纵轴为精确度Precision,曲线反映了模型在不同精确度和召回率下的表现。对比P-R曲线可以看出本文算法的精确度和召回率均高于原YOLOv7,且图d中P-R曲线在精确度和召回率较高的位置均表现良好,表明该模型对预测结果的准确度较高且该模型对真实正例的识别能力较强。

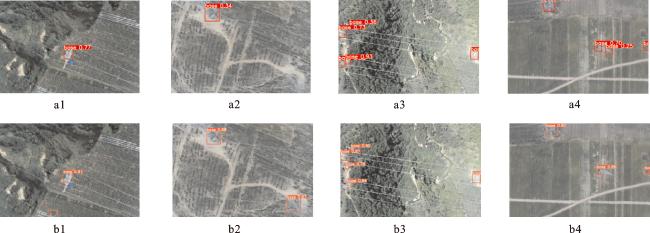
为了看到更为直观的对比效果,本文选取不同背景信息的图像进行预测,包括但不限于山地、耕地、丘陵、梯田和平原等,原YOLOv7和改进后的YOLOv7检测算法在部分所选图像上的检测结果如图7所示。第一行图a1~a4为原YOLOv7的检测结果图像,第二行图b1~b4为本文算法的检测结果图像,通过对比可以看出,对于a1这种塔基底不完整,a2这种塔基底与背景对比不明显的情况,原YOLOv7均出现了漏检的情况;对于a3和a4这种塔顶形似塔基底,原YOLOv7出现了误检的情况。查看第二行的图像可知,改进后的模型能够在塔基底不完整,背景嘈杂和塔顶干扰的场景下避免漏检和误检,能够准确地进行塔基底目标检测。另外,对比检测结果也可知本文算法预测的置信度分数通常高于原始YOLOv7,特别是对于塔基显示不完全或者塔基尺寸较小的目标,改进后的YOLOv7算法的检测效果也更好,这表明改进后的网络模型整体性能更好。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
6 结语
本文通过在原始YOLOv7的Backbone层中加入CBAM注意力机制,并引入WIoU v3代替原坐标损失函数CIoU,来对YOLOv7网络模型进行改进。与目前主流的目标检测算法在自建的输电塔塔基数据集上进行对比实验,实验结果表明在同等实验环境下本文算法拥有更高的检测精度,证实了改进后的YOLOv7目标检测算法在输电塔塔基检测中的可行性和有效性。然而,不可否认的是,部分主流算法凭借较快的训练和推理速度、较低的内存占用,使其在移动设备或者资源受限的设备中优势明显。后续我们会在保证检测精度的前提下,对本文改进后的YOLOv7检测算法进行剪枝实验,来降低模型的参数量和计算量,以达到更好的性能。