

功率超声技术已广泛应用于食品处理[1]、环保[2]、医疗[3]和农业[4]等领域。超声振动系统是功率超声设备中的重要组成部分,一般由超声换能器、超声变幅杆以及加工工具组成。超声变幅杆是高功率超声振动系统的核心部件,它可以放大振动幅度或速度,并将超声能量聚集到换能器输出端的较小的面积上。在高功率超声应用中,如:超声加工、超声焊接、超声搪锡等,辐射面的振动幅度一般需要几十到几百微米。因此,需要在换能器的端面连接超声变幅杆,将机械振幅放大到相应幅度。此外,超声变幅杆还可以作为机械阻抗变换器,在换能器与声负载之间进行阻抗匹配,使超声能量更有效地从换能器传递到负载。
按母线形状分类,常见的变幅杆有阶梯形、指数形、悬链线形、圆锥形等[5⇓⇓⇓-9]。传统变幅杆的振幅放大系数往往不能满足高功率超声应用的振幅需求。文献[10]设计了截面为贝塞尔曲线的变幅杆,其振幅放大系数比相同尺寸的悬链线形变幅杆高约70%。文献[11]在阶梯形变幅杆的输出端增加了周向均布6个斜槽的圆环传振杆,在纵向单激励超声振动输入条件下该变幅杆能够获得纵扭谐振输出和大振幅。文献[12]在实心倒锥杆的基础上设计了前端开矩形通孔的倒锥形变幅杆,该变幅杆不仅有较大的输出面积同时也能够满足实际加工中振幅放大系数与应力的要求。文献[13⇓-15]设计了基于傅里叶变幅杆的超声雾化系统,由于该系统能够产生更大的振幅,因而雾化液滴数量更多、直径更小。文献[16]指出傅里叶变幅杆的性能介于简单阶梯形和指数形之间。
对于傅里叶变幅杆的具体设计方法、性能参数以及与传统变幅杆的优劣对比尚未见系统研究。本文计算了不同阶次傅里叶变幅杆形状函数,获得了相应的形状因数和位移节点;基于有限元方法分析了傅里叶变幅杆的谐振频率、位移幅值和位移节点。最后比较了其与传统变幅杆的性能优劣。
1 控制方程
均匀、各向同性材料构成的变截面杆,不计其机械损耗且杆的横截面尺寸远小于波长时,当平面纵波沿杆轴向传播,应力在杆的横截面上均匀分布。在简谐振动的情况下,变截面杆的纵向振动方程为
+ +k2ξ=0。
式中:k=ω/c为波数;ω为圆频率;c= 为纵波在杆中的传播速度;s=s(x)为杆的横截面积函数;ξ=ξ(x)为质点位移函数。式(1)可改写为
ξ″+ξ' + ξ=0。
令X=x/l为归一化质点位置,U(X)=ξ(x/l)为质点归一化位移函数, Ω=2πl/λ=πr,其中l为杆的长度、λ为波长、r= 为杆长与波长比的2倍,A(X)=s(x/l)为杆的归一化横截面积函数。则式(2)可化简为
=- 。
利用反推法选择傅里叶级数作为该变幅杆的振动位移函数,对式(3)进行积分得到归一化截面积函数A(X),由式(4)可得傅里叶变幅杆的形状函数R(X)。归一化的质点位移函数如式(5)所示,其中aK为级数中第K次项的系数。
= ,
$ \begin{aligned} U(X)= & \sum_{K=0}^{N} \alpha_{K} \cos (K \pi X) \\ & (K=0,1,2, \cdots, N) 。\end{aligned}$
2 形状函数
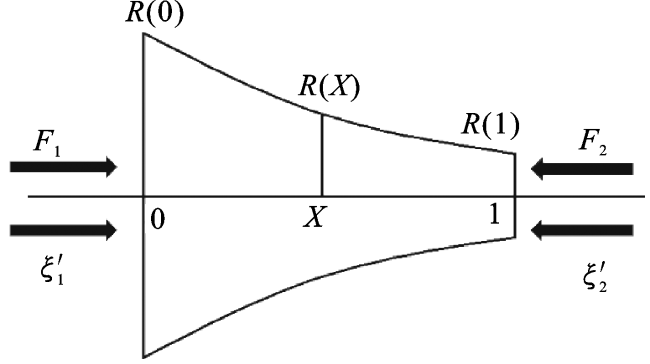
傅里叶变幅杆见图1,F1、ξ1'和F2、ξ2'分别为变幅杆输入端(X=0)和输出端(X=1)的力及振动速度,边界条件为两端自由且两端振动相位反转。杆的截面半径梯度有限且连续,即杆的大端面处(X=0)截面半径R(0)最大,形状函数R(X)随X增大而减小,小端面处(X=1)截面半径R(1)最小。对式(3)在X=0即杆的大端面处求极限得
= =- =β。
式中:R(0)为常数; =0,因此β的值为0。由式(5)得
式(7)成立需要满足
同理在X=1即杆的小端面处求极限也可得出该杆边界需要满足的条件为
U″(1)+Ω2U(1)=0。
2.1 N=0和1时的形状函数
N=0,可得杆在振动时振动位移处处为定值,因此不予考虑。N=1,质点位移函数为U(X)=α0+α1cos(πX)。经计算,N=1对应均匀棒,不能放大振动位移。
2.2 N=2时的形状函数
质点位移函数为U(X)=α0+α1cos(πX)+α2cos(2πX),变幅杆的长度为半波长(r=1),将质点位移函数代入杆的边界条件,解得α0= (1-M)U0,α1= U0,α2= U0。将解得的质点位移函数代入式(3)中得到
= 。
其中μ= 。由上式得该变幅杆的形状函数R(X)与大端半径R(0)的关系为
= 。
由式(12)可知,该变幅杆的归一化形状函数R(X)与振幅放大系数以及大端半径相关。振幅放大系数M与大端半径R(0)确定后,可计算出杆的形状函数。
该变幅杆的形状函数与振幅放大系数有关,设计时需要事先给出所需要的振幅放大系数。
2.3 高阶次变幅杆形状函数
当N=3时,形状函数可由下式计算:
= 。
N=4时,可得
= 。
其中α为自由变量。对上述函数积分即可获得相应傅里叶变幅杆的形状函数。
3 形状因数和位移节点
材料参数确定后,变幅杆的谐振长度和谐振频率关系为
l= 。
式中:l为谐振长度;f为谐振频率;c为纵波在杆中的传播速度。
变幅杆的形状因数可由下式计算:
φ= = = 。
式中:φ为形状因数;ξmax为最大质点位移;k=ω/c为波数; 为杆中最大应变;M为振幅放大系数;|U'|为归一化质点位移函数的导数的绝对值;U0为变幅杆大端面处的最大振动位移。
由U(X)=0可得变幅杆的归一化位移节点X0即
U(X) =0。
解得
X0= 。
则位移节点为
x0=X0l= 。
4 振动性能仿真计算与分析
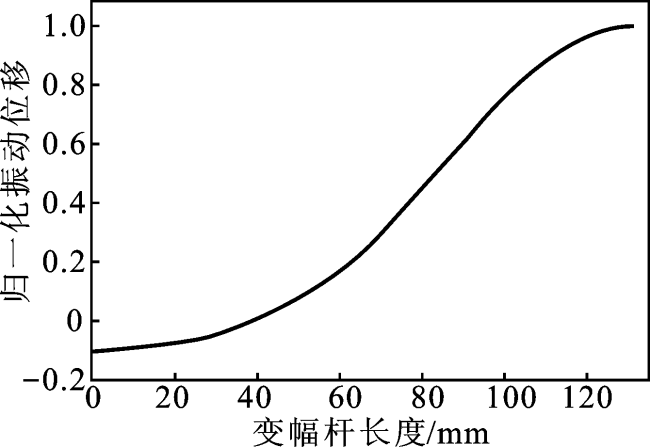
表1 5种变幅杆归一化振幅放大系数Tab.1 Normalized amplitude of five types of horn |
| 面积系数 | M1 | M2 | M3 | M4 | M5 |
|---|---|---|---|---|---|
| 2.28 | 2.28 | 2.17 | 2.56 | 5.20 | 3.00 |
| 2.83 | 2.83 | 2.52 | 3.28 | 8.01 | 4.00 |
| 3.34 | 3.34 | 2.82 | 4.04 | 11.16 | 5.00 |
| 3.84 | 3.84 | 3.06 | 4.83 | 14.75 | 6.00 |
| 4.30 | 4.30 | 3.26 | 5.65 | 18.49 | 7.00 |
| 4.76 | 4.76 | 3.44 | 6.51 | 22.66 | 8.00 |
| 5.20 | 5.20 | 3.55 | 7.22 | 27.04 | 9.00 |
| 5.62 | 5.62 | 3.65 | 7.95 | 31.58 | 10.00 |
表2 5种变幅杆形状因数Tab.2 Shape factor of five types of horn |
| 面积系数 | φ1 | φ2 | φ3 | φ4 | φ5 |
|---|---|---|---|---|---|
| 2.28 | 1.41 | 1.45 | 1.32 | 1 | 1.36 |
| 2.83 | 1.51 | 1.57 | 1.40 | 1 | 1.41 |
| 3.34 | 1.59 | 1.66 | 1.45 | 1 | 1.44 |
| 3.84 | 1.64 | 1.74 | 1.50 | 1 | 1.45 |
| 4.30 | 1.69 | 1.80 | 1.53 | 1 | 1.47 |
| 4.76 | 1.74 | 1.85 | 1.57 | 1 | 1.47 |
| 5.20 | 1.77 | 1.89 | 1.59 | 1 | 1.48 |
| 5.62 | 1.80 | 1.93 | 1.61 | 1 | 1.49 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
理论计算得到阶梯形变幅杆的形状因数是1,但是由于阶梯形变幅杆的截面变化是跃变的,存在应力集中,所以其实际形状因数小于等于0.8[16]。
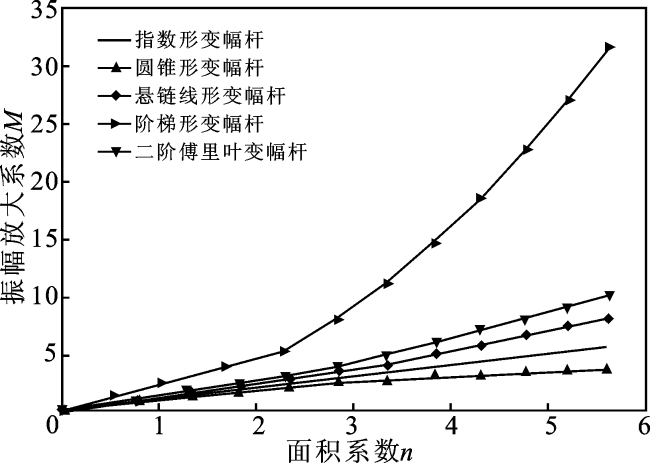
由表2可知二阶傅里叶变幅杆的形状因数随面积系数n的增加而增大。当n大于等于3.34时,圆锥形变幅杆的形状因数最大,其次是指数形、悬链线形、二阶傅里叶,最小为阶梯形;当n小于3.34(n=2.28,n=2.83),圆锥形变幅杆的形状因数最大,其次是指数形、二阶傅里叶、悬链线形,最小为阶梯形。n相同时,二阶傅里叶变幅杆的形状因数恒大于阶梯形的形状因数。
由式(18)可计算振幅放大系数M为3~10时二阶傅里叶变幅杆的解析位移节点值x0,与由归一化振动位移曲线计算的仿真位移节点值x0'进行比较,结果如表3所示。
表3 变幅杆的位移节点Tab.3 Displacement node of horn |
| M | x0/mm | x0'/mm | (x0-x0')/mm |
|---|---|---|---|
| 3.00 | 54.42 | 51.83 | 2.59 |
| 4.00 | 51.54 | 48.67 | 2.87 |
| 5.00 | 49.36 | 46.34 | 3.02 |
| 6.00 | 47.62 | 44.46 | 3.16 |
| 7.00 | 46.16 | 42.96 | 3.20 |
| 8.00 | 44.92 | 41.66 | 3.26 |
| 9.00 | 43.85 | 40.55 | 3.30 |
| 10.00 | 42.90 | 39.56 | 3.34 |
由表3可知二阶傅里叶变幅杆的位移节点随振幅放大系数的增加而减小,位移节点的解析值与仿真值的差值均在4 mm以内。
由式(12)可得二阶傅里叶变幅杆面积系数n与振幅放大系数M的关系,即
n= = = 。
该变幅杆的形状函数与振幅放大系数相关,设计时需要事先给出所需要的振幅放大系数。为了避免应力集中,一般取面积系数n小于6、相应的振幅放大系数M小于10.90。
5 结论
本文从变截面杆的波动方程出发,研究了以不同阶次的傅里叶级数为振动位移函数的傅里叶变幅杆模型,推导了不同阶次傅里叶变幅杆的形状函数;仿真计算了其振幅放大系数、谐振频率和位移节点;最后比较了其与传统变幅杆的性能优劣。
谐振频率与面积系数相同的条件下,二阶傅里叶变幅杆的振幅放大系数远大于指数形、悬链线形、圆锥形变幅杆的振幅放大系数;其形状因数远大于阶梯形的形状因数。在兼顾振幅放大系数和形状因数的条件下,二阶傅里叶变幅杆综合性能比传统变幅杆更好。
经计算,阶数大于1,不同阶数傅里叶变幅杆的放大系数和长度相同时,傅里叶变幅杆阶数越高,其面积系数越大,形状因数越大,位移节点越大。
二阶傅里叶变幅杆的形状函数与振幅放大系数有关,设计时为了避免应力集中,一般取面积系数n小于6和振幅放大系数M小于10.90。参照本文的方法,可推导高次傅里叶变幅杆的形状函数并计算其性能参数。