

1 MFBD迭代策略和参量化方法基本原理
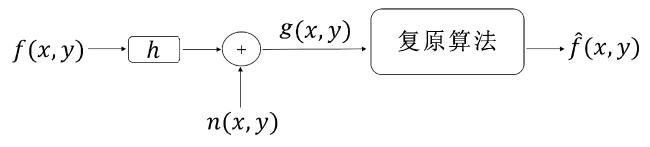
1.1 多帧图像盲解卷积基本原理
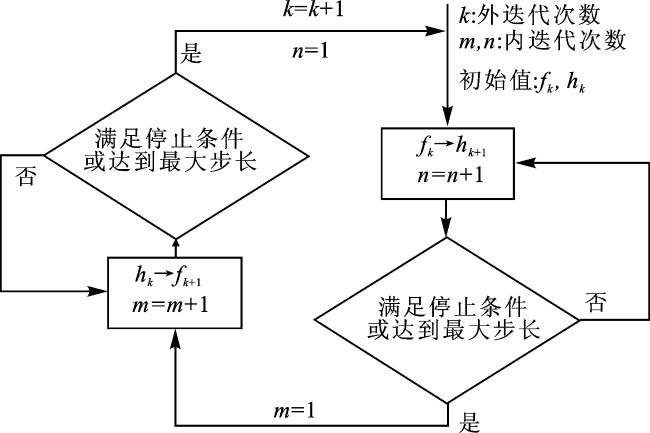
1.2 交替迭代
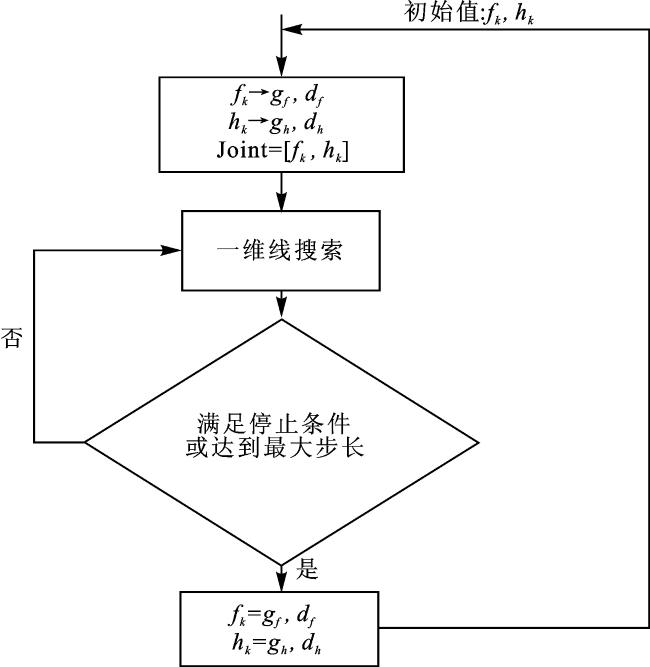
1.3 联合迭代
2 MFBD迭代策略和参量化方法结果对比
2.1 联合迭代与交替迭代参量化方法与初值设置
=|F[P(λhfx,λhfy) ]|2,
表1 联合迭代与交替迭代参量化方法与初值设置Tab.1 Parametric and initialization methods for joint and alternating iteration |
| 迭代策略 | PSF参量化 | PSF初始值 | rk |
|---|---|---|---|
| 联合迭代 | 灰度矩阵参量 | Biggs初值 | 未缩小 |
| 随机相位 | 未缩小 | ||
| 相位参量 | 随机相位 | 前10次缩小0.000 1,之后未缩小 | |
| Zernike参量 | 随机相位 | 前10次缩小0.01,之后未缩小 | |
| 交替迭代 | 灰度矩阵参量 | Biggs初值 | 未缩小 |
| 随机相位 | 未缩小 | ||
| 相位参量 | 随机相位 | 未缩小 | |
| Zernike参量 | 随机相位 | 未缩小 |
2.2 实验数据
表2 CAOS模拟AO系统参数和观测条件Tab.2 Parameters of AO and observation conditions by CAOS |
| 模块 | 参数 | 数值 |
|---|---|---|
| 大气湍流 | 大气相干长度r0/m | 0.05 |
| 湍流屏数/层 | 6 | |
| 湍流屏高度/m | [0,100,500,1 000,2 000,5 000] | |
| 各层权重 | [0.4,0.2,0.2,0.1,0.05,0.05] | |
| 风速/(m·s-1) | 15 | |
| 外尺度/m | 20 | |
| 科学相机 | 观测波长/nm | 700 |
| 带宽/nm | 200 | |
| 曝光时间/ms | 10 | |
| 像素大小(个数) | 0.051 8″(256×256) | |
| 量子效率 | 0.9 | |
| 噪声类型 | 光子噪声+读出噪声 | |
| 观测目标 | 像素大小(个数) | 0.051 5″(256×256) |
| 星等数(mv) | 0~8 | |
| 天光背景 | 21星等 | |
| 望远镜 | 望远镜口径/m | 2 |
| 遮光比 | 0.1 | |
| 天光背景 | 21 | |
| 跟踪相机 | 像素大小(个数) | 0.8″(16×16) |
| 观测波长/nm | 500 | |
| 观测带宽/nm | 400 | |
| 量子效率 | 0.9 | |
| 曝光时间/ms | 10 | |
| 分光比 | 10% | |
| 噪声 | 光子噪声+读出噪声 | |
| 变形镜 | 驱动器数量 | 11×11 |
| 最大变形/μm | 6 | |
| 时间延迟/ms | 1 | |
| 响应速度/kHz | 1 | |
| 哈特曼波前传感器 | 子孔径数 | 10×10 |
| 子孔径像素大小(个数) | 0.93″(14×14) | |
| 子孔径视场 | 13.2″ | |
| 观测波长/nm | 500 | |
| 观测带宽/nm | 200 | |
| 量子效率 | 0.9 | |
| 曝光时间/ms | 1 | |
| 噪声类型 | 光子噪声+读出噪声 | |
| 波前重构 | 条件数 | 5(使用88种模式) |
| 控制系统 | 增益 | 0.6 |
2.3 结果
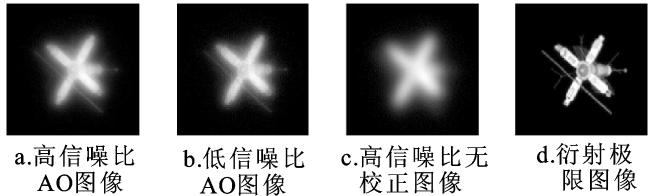
2.3.1 高信噪比AO图复原对比
表3 高信噪比AO图像复原结果对比Tab.3 Results on high SNR degraded image |
| 迭代策略 | 灰度矩阵参量化 Biggs初值 | 灰度矩阵参量化 随机初值 | 相位参量化 随机相位初值 | Zernike参量化 随机相位初值 |
|---|---|---|---|---|
| 联合迭代 | 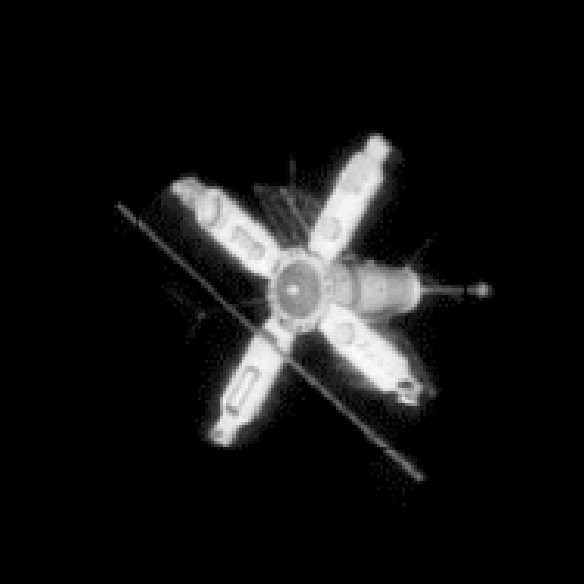 |  | 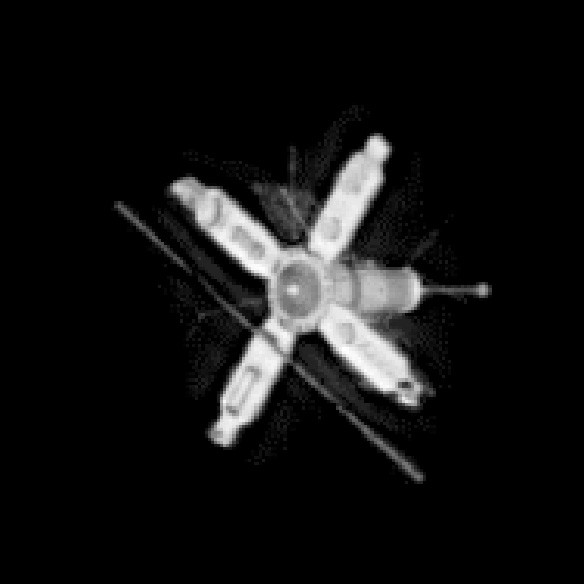 |  |
| 交替迭代 |  |  |  |  |
注:网络版为彩图。 |
表4 高信噪比AO图像复原结果NMSETab.4 NMSE of results from high SNR image by two optimization strategies |
| 方法 | 灰度矩阵参量 | 相位参量 | Zernike参量 | |||||
|---|---|---|---|---|---|---|---|---|
| Biggs初值 | 随机初值 | 随机相位初值 | 随机相位初值 | |||||
| 均值 | 方差 | 均值 | 方差 | 均值 | 方差 | 均值 | 方差 | |
| 联合迭代 | 0.039 | 3.408×10-5 | 0.164 | 1.100×10-5 | 0.046 | 9.916×10-4 | 0.091 | 5.249×10-4 |
| 交替迭代 | 0.109 | 3.301×10-5 | 0.238 | 3.000×10-5 | 0.221 | 3.025×10-5 | 0.216 | 8.615×10-5 |
注:退化图像VNMSE=0.298。 |
2.3.2 低信噪比AO图复原对比
表5 低信噪比AO图像复原结果对比Tab.5 Results on low SNR degraded image |
| 迭代策略 | 灰度矩阵参量化 Biggs初值 | 灰度矩阵参量化 随机初值 | 相位参量化 随机相位初值 | Zernike参量化 随机相位初值 |
|---|---|---|---|---|
| 联合迭代 |  |  |  | 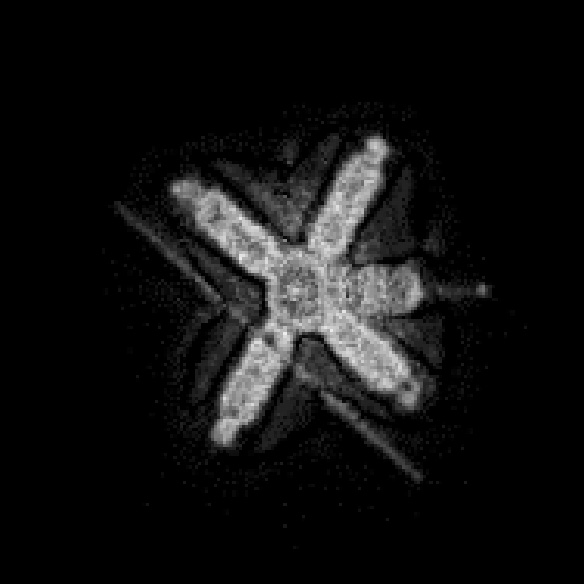 |
| 交替迭代 | 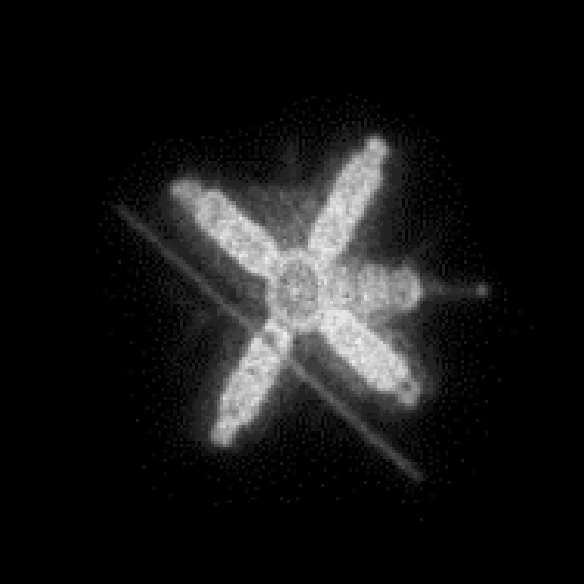 | 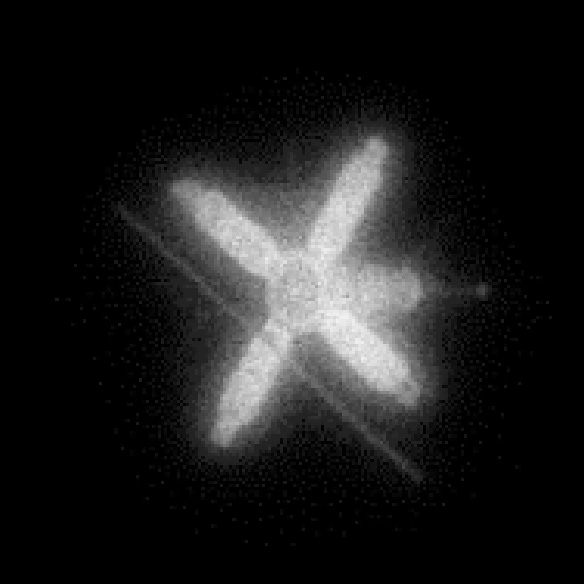 | 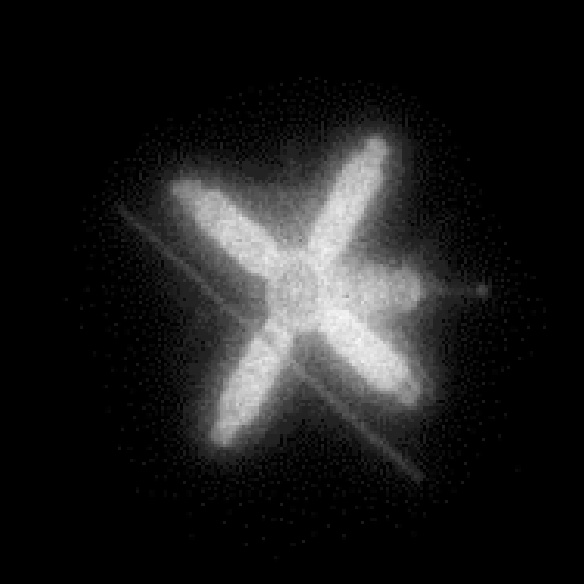 |  |
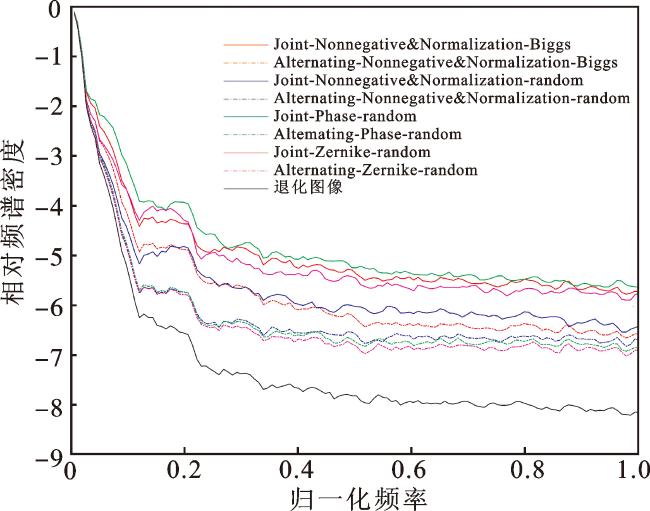
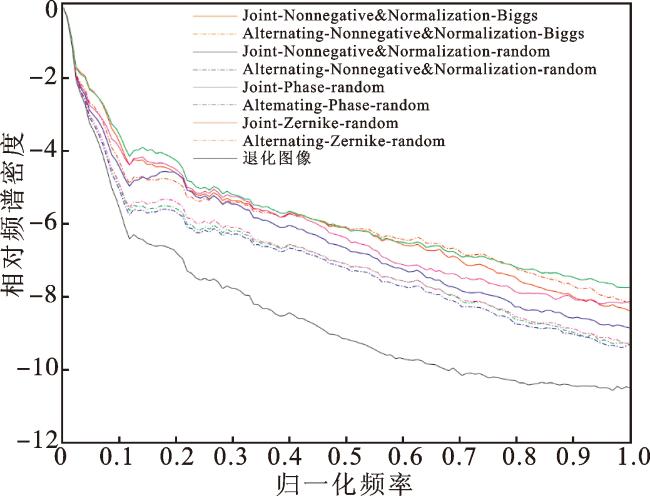
图7 低信噪比AO图像复原结果频谱曲线Joint表示联合迭代,Alternating表示交替迭代;Nonnegative&Normalization表示灰度矩阵参量,Phase表示相位参量,Zernike表示Zernike参量;Biggs表示采用Biggs初值,random表示采用随机相位初值。图中联合迭代结果均用实线,交替迭代结果均用点划线。 注:网络版为彩图。 Fig.7 Frequency spectrum curve about results with low SNR image |
表6 低信噪比AO图像复原结果NMSETab.6 NMSE of results from low SNR image by two optimization strategies |
| 方法 | 灰度矩阵参量 | 相位参量 | Zernike参量 | |||||
|---|---|---|---|---|---|---|---|---|
| Biggs初值 | 随机初值 | 随机相位初值 | 随机相位初值 | |||||
| 均值 | 方差 | 均值 | 方差 | 均值 | 方差 | 均值 | 方差 | |
| 联合迭代 | 0.183 | 9.79×10-4 | 0.249 | 1.72×10-4 | 0.194 | 1.13×10-4 | 0.198 | 1.51×10-4 |
| 交替迭代 | 0.159 | 5.10×10-5 | 0.263 | 5.37×10-5 | 0.249 | 8.53×10-5 | 0.253 | 4.51×10-5 |
注:退化图像VNMSE=0.286。 |
2.3.3 无AO校正图复原对比
表7 无AO校正图像复原结果对比Tab.7 Results on degraded image without AO system |
| 迭代策略 | 灰度矩阵参量化 Biggs初值 | 灰度矩阵参量化 随机初值 | 相位参量化 随机相位初值 | Zernike参量化 随机相位初值 |
|---|---|---|---|---|
| 联合迭代 |  |  |  |  |
| 交替迭代 |  |  |  |  |
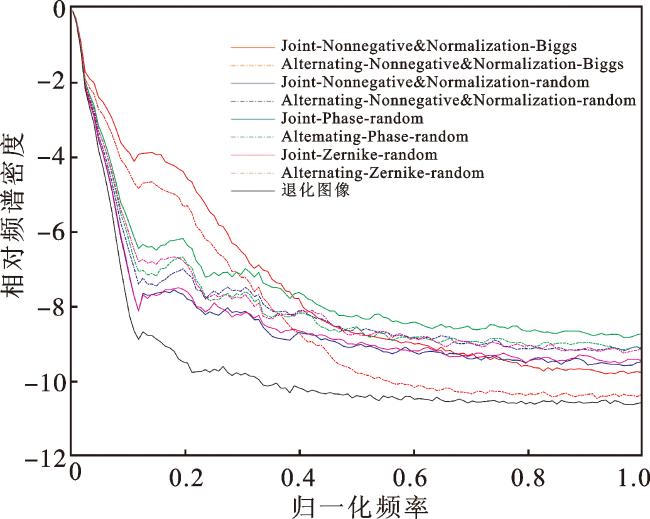
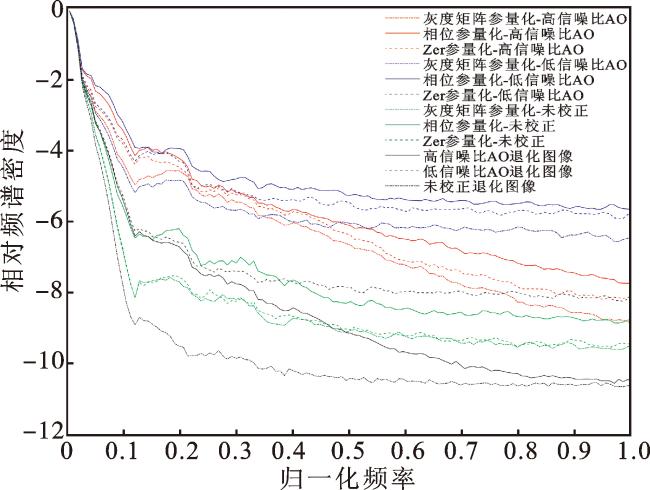
图8 无AO退化图像复原结果频谱曲线Joint表示联合迭代,Alternating表示交替迭代;Nonnegative&Normalization表示灰度矩阵参量,Phase表示相位参量,Zernike表示Zernike参量;Biggs表示采用Biggs初值,random表示采用随机相位初值。图中联合迭代结果均用实线,交替迭代结果均用点划线。 注:网络版为彩图。 Fig.8 Frequency spectrum curve about image without AO system |
表8 湍流退化图像复原结果NMSETab.8 NMSE of results from turbulence image by two optimization strategies |
| 方法 | 灰度矩阵参量 | 相位参量 | Zernike参量 | |||||
|---|---|---|---|---|---|---|---|---|
| Biggs初值 | 随机初值 | 随机相位初值 | 随机相位初值 | |||||
| 均值 | 方差 | 均值 | 方差 | 均值 | 方差 | 均值 | 方差 | |
| 联合迭代 | 0.372 | 2.42×10-5 | 0.419 | 1.10×10-5 | 0.342 | 6.30×10-5 | 0.417 | 1.00×10-5 |
| 交替迭代 | 0.332 | 1.03×10-5 | 0.403 | 1.40×10-5 | 0.387 | 1.90×10-5 | 0.384 | 1.80×10-5 |
注:退化图像VNMSE=0.41。 |
2.3.4 联合迭代下不同PSF参量化结果对比
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
图9 不同退化图像3种参量化复原结果对比注:图中相位参量化结果均用实线表示,灰度矩阵参量化结果均用点划线表示,Zernike参量化结果均用长虚线表示;红色为高信噪比AO图像复原结果,蓝色为低信噪比AO图像复原结果,绿色为无校正退化图像复原结果,黑色为退化图像。网络版为彩图。 Fig.9 Frequency spectrum curve about three types of parameterization methods in different degraded image |
表9 PSF 3种参量化复原结果Tab.9 NMSE of results by three types of PSF parametrization |
| 图像类型 | 灰度矩阵参量化 | 相位参量化 | Zernike参量化 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| VNMSE | 均值 | 方差 | VNMSE | 均值 | 方差 | VNMSE | 均值 | 方差 | |
| 高信噪比AO图像 | 0.139 | 0.164 | 1.100×10-5 | 0.032 | 0.046 | 9.916×10-4 | 0.086 | 0.091 | 5.249×10-4 |
| 低信噪比AO图像 | 0.250 | 0.249 | 1.72×10-4 | 0.193 | 0.194 | 1.13×10-4 | 0.194 | 0.198 | 1.51×10-4 |
| 湍流退化图像 | 0.378 | 0.419 | 1.10×10-3 | 0.309 | 0.342 | 6.30×10-3 | 0.374 | 0.417 | 1.00×10-3 |