

1 基本概念
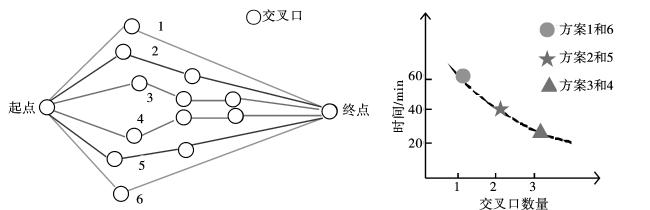
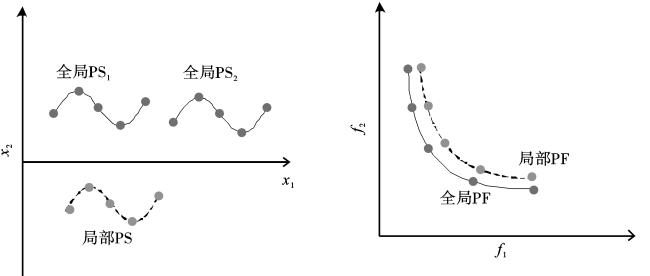
1.1 多模态多目标优化问题
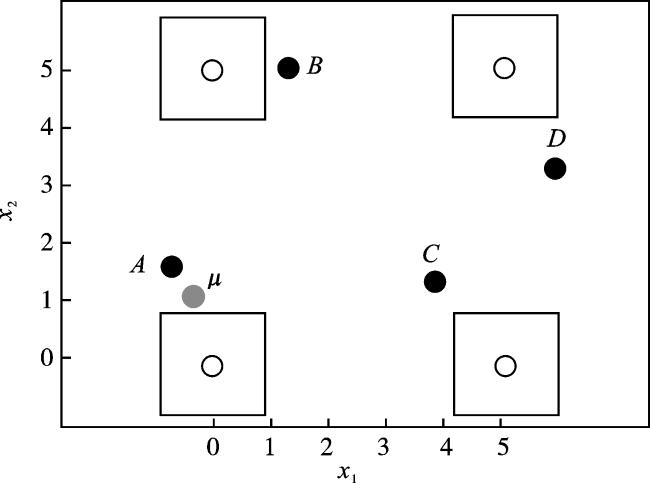
1.2 差分进化算法
2 MMOEA/D-DE
2.1 研究动机
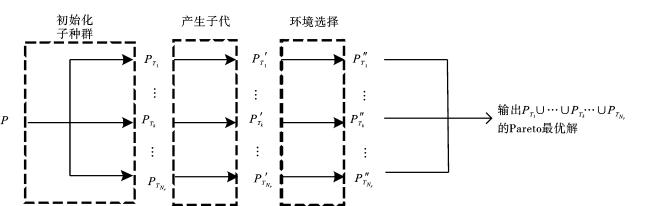
2.2 算法框架
| 算法1 MMOEA/D-DE |
|---|
| 输入:种群规模NP,最大函数评价次数max FES,控制参数t,比例因子F,交叉概率Cr。 输出:Pareto解集Q 01:初始化种群P={x1,x2,…, }和权重向量W={W1,W2,…, }。 02:计算种群的适应度值Fit和理想点Z*。 03:for i=1:NP do 04: =[ ]。 05:end for 06:for i=1:NP do 07: = ∪Xi,其中j=min{gtch(Xi|W1,Z*),…,gtch(Xi| ,Z*)}。 08:end for 09:while FES<max FES 10: 设置PT= ∪ ∪…∪ 。 11: for i=1:|PT| do 12: 根据算法2产生子代μ,并更新理想点Z*。 13: 根据算法3更新子种群 ,其中j=min{gtch(μ|W1,Z*),…,gtch(μ| ,Z*)}。 14: FES=FES+1。 15: end for 16:end while 17:Q←PT中的所有Pareto最优解。 |
2.3 搜索算法
| 算法2 搜索算法 |
|---|
| 输入:种群规模NP,存档PT,当前函数评价次数FES,最大函数评价次数max FES,个体X。 输出:子代μ。 01:T=[NP/10]。 02:if FES/max FES≤0.5 03: 根据DE/current-to-rand/1从PT中产生子代μ 。 04:else 05: W*←Wj的T个相邻权重的集合,其中j=min{gtch(Xi|W1,Z*),…,gtch(Xi| ,Z*)}。 06: B←W*中所有权重向量的子种群的集合。 07: 根据DE/rand-to-best/1/bin从B中产生子代μ。 08: end if |
2.4 环境选择
2.5 复杂度分析
3 实验结果及分析
3.1 测试函数与参数设置
表1 问题描述Tab.1 Problem description |
| 测试函数 | n | m | xl | xu | PSn |
|---|---|---|---|---|---|
| MMF1 | 2 | 2 | [1 -1] | [3 1] | 2 |
| MMF1_e | 2 | 2 | [1 -20] | [3 20] | 2 |
| MMF1_z | 2 | 2 | [1 -1] | [3 1] | 2 |
| MMF2 | 2 | 2 | [0 0] | [1 2] | 2 |
| MMF3 | 2 | 2 | [0 0] | [1 1.5] | 2 |
| MMF4 | 2 | 2 | [1 0] | [1 2] | 4 |
| MMF5 | 2 | 2 | [1 -1] | [3 3] | 4 |
| MMF6 | 2 | 2 | [1 -1] | [3 2] | 4 |
| MMF7 | 2 | 2 | [1 -1] | [3 1] | 2 |
| MMF8 | 2 | 2 | [-π 0] | [π 9] | 4 |
| MMF9 | 2 | 2 | [0.1 0.1] | [1.1 1.1] | 2 |
| MMF10 | 2 | 2 | [0.1 0.1] | [1.1 1.1] | 2 |
| MMF11 | 2 | 2 | [0.1 0.1] | [1.1 1.1] | 2 |
| MMF12 | 2 | 2 | [0 0] | [1 1] | 8 |
| MMF13 | 3 | 2 | [0.1 0.1 0.1] | [1.1 1.1 1.1] | 2 |
| MMF14 | 3 | 3 | [0 0 0] | [1 1 1] | 2 |
| MMF14_a | 3 | 3 | [0 0 0] | [1 1 1] | 2 |
| MMF15 | 3 | 3 | [0 0 0] | [1 1 1] | 2 |
| MMF15_a | 3 | 3 | [0 0 0] | [1 1 1] | 2 |
| SYM_PART simple | 2 | 2 | [-20 -20] | [20 20] | 9 |
| SYM_PART rotated | 2 | 2 | [-20 -20] | [20 20] | 9 |
| Omni-test | 3 | 2 | [0 0 0] | [6 6 6] | 27 |
3.2 性能评价指标
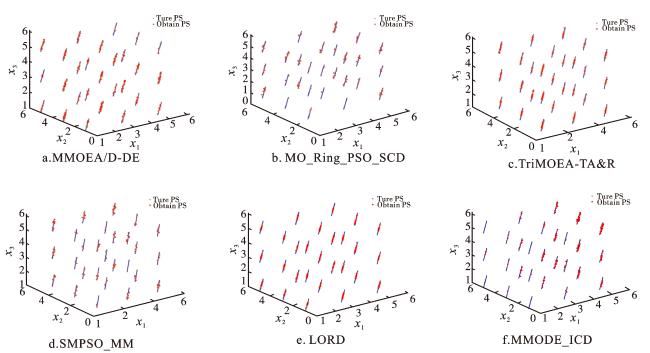
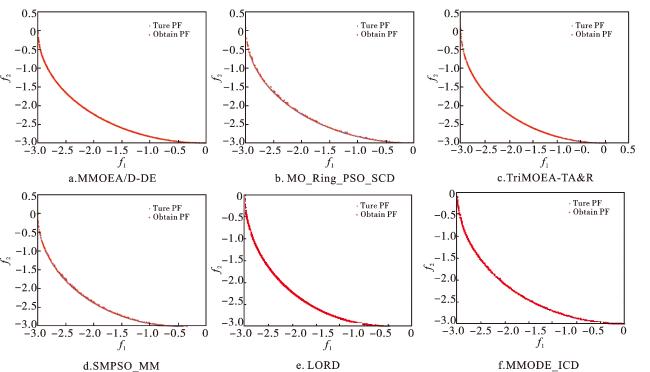
3.3 实验结果
表2 指标PSP值统计Tab.2 Statistics of indicator PSP |
| 测试函数 | MMOEA/D-DE | MO_Ring_PSO_SCD | TriMOEA-TA&R | SMPSO_MM | LORD | MMODE_ICD |
|---|---|---|---|---|---|---|
| MMF1 | 97.16 | 66.73(+) | 30.26(+) | 85.43(+) | 69.14(+) | 72.51(+) |
| MMF1_e | 1.41 | 5.22(-) | 1.01(=) | 7.94(-) | 0.39(+) | 7.92(-) |
| MMF1_z | 134.02 | 91.41(+) | 28.76(+) | 198.36(-) | 57.33(+) | 79.81(+) |
| MMF2 | 454.88 | 106.04(+) | 71.67(+) | 152.92(+) | 143.63(+) | 358.12(+) |
| MMF3 | 523.84 | 139.78(+) | 31.10(+) | 179.79(+) | 170.30(+) | 445.72(+) |
| MMF4 | 232.61 | 113.24(+) | 83.50(+) | 138.48(+) | 132.36(+) | 126.20(+) |
| MMF5 | 53.34 | 33.44(+) | 16.77(+) | 40.25(+) | 30.02(+) | 25.91(+) |
| MMF6 | 55.20 | 36.53(+) | 22.38(+) | 41.99(+) | 32.42(+) | 33.41(+) |
| MMF7 | 169.07 | 108.96(+) | 58.41(+) | 142.80(+) | 127.90(+) | 136.33(+) |
| MMF8 | 84.01 | 47.41(+) | 9.58(+) | 61.98(+) | 14.25(+) | 20.40(+) |
| MMF9 | 756.94 | 332.35(+) | 348.68(+) | 554.91(+) | 666.47(+) | 465.10(+) |
| MMF10 | 0.18 | 6.04(-) | 0.12(=) | 5.03(-) | 0.09(+) | 5.40(-) |
| MMF11 | 0.69 | 3.16(-) | 0.64(=) | 0.96(=) | 0.83(-) | 4.01(-) |
| MMF12 | 0.38 | 4.28(-) | 0.06(+) | 1.01(-) | 0.62(-) | 4.07(-) |
| MMF13 | 1.96 | 3.05(-) | 1.72(+) | 1.96(=) | 1.84(=) | 1.86(=) |
| MMF14 | 30.83 | 26.62(+) | 28.42(+) | 29.84(+) | 21.16(+) | 30.18(+) |
| MMF14_a | 24.65 | 23.02(=) | 21.02(+) | 26.58(=) | 15.71(+) | 30.70(-) |
| MMF15 | 5.10 | 6.81(-) | 3.14(+) | 7.03(-) | 0.78(+) | 3.96(+) |
| MMF15_a | 5.19 | 6.46(-) | 3.64(+) | 6.35(-) | 3.64(+) | 4.01(+) |
| SYM_PART simple | 39.15 | 21.89(+) | 77.49(-) | 31.32(+) | 46.20(-) | 52.39(-) |
| SYM_PART rotated | 32.49 | 18.30(+) | 14.75(+) | 16.78(+) | 18.07(+) | 52.48(-) |
| Omni-test | 16.84 | 7.24(+) | 12.58(+) | 8.14(+) | 26.01(-) | 2.30(+) |
| 汇总(+/=/-) | 14/1/7 | 18/3/1 | 13/3/6 | 17/1/4 | 14/1/7 |
注:加粗表明最优。 |
表3 指标IGDF值统计Tab.3 Statistics of indicator IGDF |
| 测试函数 | MMOEA/D-DE | MO_Ring_PSO_SCD | TriMOEA-TA&R | SMPSO_MM | LORD | MMODE_ICD |
|---|---|---|---|---|---|---|
| MMF1 | 5.828×10-4 | 9.938×10-4(+) | 2.368×10-3(+) | 6.857×10-4(+) | 6.226×10-4(+) | 6.886×10-4(+) |
| MMF1_e | 7.826×10-4 | 2.948×10-3(+) | 2.467×10-3(+) | 2.001×10-3(+) | 6.817×10-4(-) | 1.596×10-3(+) |
| MMF1_z | 4.733×10-4 | 9.501×10-4(+) | 2.362×10-3(+) | 6.237×10-4(+) | 5.394×10-4(+) | 6.677×10-4(+) |
| MMF2 | 1.021×10-3 | 5.188×10-3(+) | 4.366×10-3(+) | 3.425×10-3(+) | 1.758×10-3(+) | 9.035×10-4(-) |
| MMF3 | 8.952×10-4 | 3.805×10-3(+) | 4.037×10-3(+) | 2.877×10-3(+) | 1.576×10-3(+) | 8.961×10-4(+) |
| MMF4 | 3.688×10-4 | 8.801×10-4(+) | 3.107×10-2(+) | 6.634×10-4(+) | 5.319×10-4(+) | 6.268×10-4(+) |
| MMF5 | 5.165×10-4 | 9.423×10-4(+) | 4.021×10-3(+) | 6.831×10-4(+) | 6.203×10-4(+) | 6.517×10-4(+) |
| MMF6 | 5.101×10-4 | 9.071×10-4(+) | 2.252×10-3(+) | 6.509×10-4(+) | 5.811×10-4(+) | 6.683×10-4(+) |
| MMF7 | 4.889×10-4 | 9.158×10-4(+) | 3.131×10-3(+) | 6.616×10-4(+) | 5.777×10-4(+) | 7.187×10-4(+) |
| MMF8 | 4.908×10-4 | 1.311×10-3(+) | 2.467×10-3(+) | 9.271×10-4(+) | 6.308×10-4(+) | 6.468×10-4(+) |
| MMF9 | 7.872×10-3 | 3.658×10-3(-) | 6.178×10-2(+) | 3.035×10-3(-) | 2.489×10-3(-) | 2.942×10-3(-) |
| MMF10 | 1.965×10-1 | 1.538×10-1(-) | 2.263×10-1(+) | 1.507×10-1(-) | 1.914×10-1(=) | 1.976×10-1(+) |
| MMF11 | 9.817×10-2 | 7.584×10-2(-) | 1.574×10-1(+) | 8.941×10-2(-) | 8.717×10-2(-) | 9.913×10-2(+) |
| MMF12 | 8.284×10-2 | 6.189×10-2(-) | 8.460×10-2(=) | 8.168×10-2(=) | 8.352×10-2(=) | 8.299×10-2(+) |
| MMF13 | 1.556×10-1 | 8.269×10-2(-) | 2.420×10-1(+) | 1.217×10-1(-) | 1.493e×10-1(=) | 1.531×10-1(=) |
| MMF14 | 5.529×10-2 | 4.867×10-2(-) | 8.526×10-2(+) | 4.655×10-2(-) | 5.398×10-2(-) | 4.162×10-2(-) |
| MMF14_a | 5.603×10-2 | 4.885×10-2(-) | 7.541×10-2(+) | 4.556×10-2(-) | 5.711×10-2(+) | 4.179×10-2(-) |
| MMF15 | 1.770×10-1 | 1.530×10-1(-) | 2.058×10-1(+) | 1.524×10-1(-) | 1.844×10-1(+) | 1.686×10-1(-) |
| MMF15_a | 1.799×10-1 | 1.553×10-1(-) | 1.954×10-1(+) | 1.538×10-1(-) | 1.840×10-1(+) | 1.676×10-1(-) |
| SYM_PART simple | 6.433×10-3 | 9.703×10-3(+) | 4.051×10-2(+) | 6.930×10-3(+) | 5.698×10-3(-) | 2.870×10-3(-) |
| SYM_PART rotated | 7.653×10-3 | 9.703×10-3(+) | 1.407×10-2(+) | 1.259×10-2(+) | 6.150×10-3(-) | 2.724×10-3(-) |
| Omni-test | 6.222×10-3 | 1.796×10-2(+) | 1.407×10-2(+) | 9.807×10-1(+) | 4.022×10-3(-) | 5.104×10-3(-) |
| 汇总(+/=/-) | 13/0/9 | 21/1/0 | 13/1/8 | 12/3/7 | 12/1/9 |
注:加粗表明最优。 |
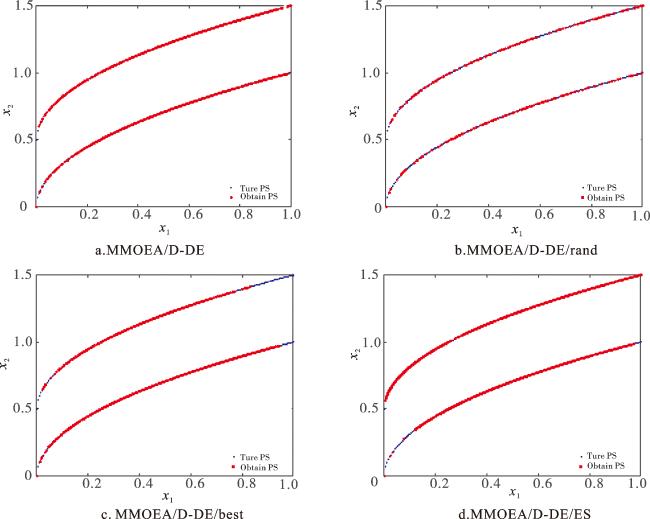
3.4 参数敏感性分析
表4 Friedman检验不同参数设置下MMOEA/D-DE的平均排名Tab.4 Average ranking of MMOEA/D-DE with different parameter settings by the Friedman test |
| 参数 | 算法 | 排名 |
|---|---|---|
| t | t=2 | 3.204 5 |
| t=3 | 3.25 | |
| t=4 | 3 | |
| t=5 | 2.386 4 | |
| t=6 | 3.159 5 | |
| T | T=[NP/5] | 2.5 |
| T=[NP/10] | 2.340 9 | |
| T=[NP/20] | 2.590 9 | |
| T=[NP/40] | 2.568 2 |
注:加粗表明最优。 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}